Stummer Diener |
Einleitung
Ich wollte einen 'Stummen Diener' in Form einer Leiter bauen (lassen), die an der Wand lehnt. Bei der Frage, wie der denn zu gestalten sei und in welchem Winkel er an der Wand lehnen solle, sind einige interessante mathematische Fragestellungen und Phänomene aufgetaucht, die ich hier darstellen möchte.
Die Idee ist, die Sprossen einer Leiter zum Ablegen von Kleidung zu nutzen.
Die Leiter lehnt an einer Wand, soll aber gleichzeitig in einer Raumecke stehen, sodass eine der Wangen entlang der anderen Wand verläuft. In dieser anderen Wand befindet sich dummerweise eine Steckdose, die natürlich weder in ihrer Funktion beeinträchtigt werden noch die Montage der Leiter an der Wand behindern soll. Mit anderen Worten: Die Leiter soll an der Steckdse vorbei geführt werden.
Die obere Ecke der Steckdose befindet sich in 34 cm Höhe über dem Fußboden und in 38 cm Entfernung von der Wand, an der die Leiter lehnt.
In welchem Winkel kann die Leiter aufgestellt werden, ohne die Steckdose zu berühren?
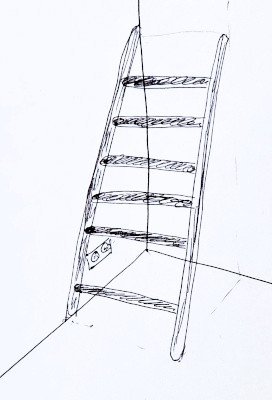 Nebenstehende Skizze soll die Problemstellung verdeutlichen: Man sieht die Leiter, die Zimmerecke und die Steckdose.
Nebenstehende Skizze soll die Problemstellung verdeutlichen: Man sieht die Leiter, die Zimmerecke und die Steckdose.
Zunächst dachte ich: "Das ist ja ganz einfach! Ich brauche nur die Funktion, die die Hüllkrve beschreibt, die entsteht, wenn die Leiter die Wand hinunterrutscht. Darin setze ich dann die Koordinaten der Steckdose ein und fertig."
Dem lagen folgende zwei Denkfehler zugrunde: Erstens ist die Funktion, die die Hüllkurve beschreibt, komplizierter als gedacht! Und zweitens liegt die Steckdosenkoordinate gar nicht auf der Hüllkurve, zumindest nicht notwendigerweise.
Aber der Reihe nach!
 Als erstes gilt es, ein sinnvolles Koordinatensystem festzulegen: Damit die − zu einer geraden Strecke vereinfachte − Leiter sich im ersten Quadranten befindet, habe ich beschlossen, von der linken Seite auf die Angelegenheit zu schauen, also quasi aus den Löchern der Steckdose herauszugucken. Den Ursprung habe ich in die Zimmerecke gelegt, sodass die Wand, an der die Leiter lehnt, der y-Achse entspricht und der Fußboden der x-Achse.
Als erstes gilt es, ein sinnvolles Koordinatensystem festzulegen: Damit die − zu einer geraden Strecke vereinfachte − Leiter sich im ersten Quadranten befindet, habe ich beschlossen, von der linken Seite auf die Angelegenheit zu schauen, also quasi aus den Löchern der Steckdose herauszugucken. Den Ursprung habe ich in die Zimmerecke gelegt, sodass die Wand, an der die Leiter lehnt, der y-Achse entspricht und der Fußboden der x-Achse.
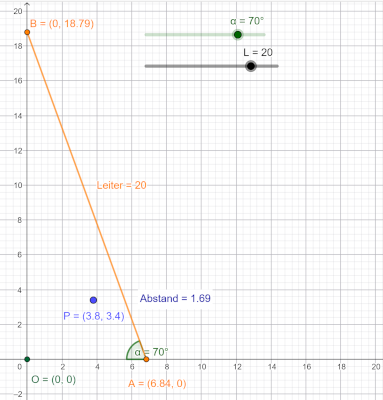
Nebenstehender Ausschnitt aus Geogebra zeigt diese Festlegungen. Als Maßstab habe ich festgelegt, dass eine Geogebra-Einheit einem Dezimeter entspricht, die zwei Meter lange Leiter wird also im Modell durch eine Strecke der Länge 20 dargestellt (wie im Bild). Mit dem Schieberegler für L kann die Länge aber auch verändert werden. Der Punkt P markiert die der Leiter nächstgelegene Ecke der Steckdose. Bei dem hier eingestellten Anstellwinkel der Leiter α von 70° ist diese Ecke 16,9 cm von der Leiter entfernt (Ausgabe "Abstand").
A(a,0) und B(0,b) sind die Punkte, an denen die Leiter den Fußboden bzw. die Wand berührt.
Die Geogebra-Datei, mit der die Bilder angefertigt wurden, kann hier zur Offline-Bearbeitung heruntergeladen oder hier online benutzt werden.
Hüllkurve der die Wand herunterrutschenden Leiter
Was ist überhaupt eine Hüllkurve? In unserem Beispiel ist es die Kurve, die die Grenze des Gebiets beschreibt, das die Leiter niemals überstreichen wird, während sie die Wand herunterrutscht. Wenn man zu einer exakteren Definition kommen will, sollte man sich zuerst fragen, wen oder was die Hüllkurve denn einhüllt. "Die Leiter!" ist die naheliegende Antwort in diesem Sachzusammenhang, schon weil in der ganzen Geschichte sonst niemand vorkommt, außer der Steckdose vielleicht. Mathematisch modellieren wir diese Leiter mit einer Strecke, genauer gesagt mit einer Schar von Strecken, weil die Gleichung der Strecke für jeden Winkel, in dem die Leiter an der Wand lehnt, eine andere ist. Genau genommen unterscheiden sich die Gleichungen der verschiedenen Leiter-Strecken nur durch eben diesen Winkel. Eine solche Größe nennt man den Parameter der Schar. Weil man Kurvenscharen auch oft benutzt, um zeitliche Abläufe zu modellieren, wird ein Parameter in Kurvenschargleichungen oft mit t dargestellt. Wir bleiben hier der besseren Anschaung wegen aber bei α für unseren Winkel. Die Gleichung unserer Leiter-Kurvenschar lautet:
Wer sich wundert, warum diese Gleichung nicht aussieht wie eine Geradengleichung der Form , wie wir sie aus der Schule kennen, der mache eine kleine Rechenübung und löse sie nach auf! Dann steht dort:
Der negative Bruch vor dem entspricht der Steigung . Aber warum steht dort ein Minuszeichen? Normalerweise ist die Steigung doch identisch mit dem Tangens des Steigungswinkels (und der Tangens ist genau das Verhältnis von Sinus zu Cosinus)! Ja, das stimmt. Aber hier haben wir den Steigungswinkel anders definiert als in der Konvention der Geradengleichung: Das Minuszeichen würde wegfallen, wenn wir statt den Wert einsetzen, die Steigung also mit Hilfe des Winkels rechts der Leiter ausdrücken.
Der y-Achsenabschnitt der Geradengleichung entsricht genau der y-Koordinate des Punktes
Aber zurück zum Thema Hüllkurve! Mit Gleichung (1) haben wir nun also eine Kurvenschar , deren Hüllkurve oder Einhüllende oder Enveloppe wir berechnen wollen. Wie macht man das? Was sind die Eigenschaften, die die Hüllkurve von anderen Kurven unterscheidet und zur Hüllkurve machen? Das sind genau zwei:
- Jeder Punkt der Hüllkurve wird von einer der (in diesem Fall) Geraden der Schar berührt.
(Im Allgemeinen können es auch andere Funktionen als Geraden sein.) - Die Hüllkurve berührt jede der (in diesem Fall) Geraden der Schar (mindestens) ein Mal.
Das hört sich zunächst so an, als sei beides dasselbe, oder? Ist es aber nicht! Wäre Bedingung 1. nicht erfüllt, könnte die Hüllkrve sich irgendwann von den Geraden lösen. Wäre Bedingung 2. nicht vorgegeben, könnte es Geraden der Schar geben, die nicht von der Hüllkurve berührt werden. Also brauchen wir beides.
Eine zwar unvollständige aber anschauliche Definition einer Hüllkurve ist: Jede ebene Kurve ist die Hüllkurve ihrer Tangenten.
Um die Hüllkurve wirklich berechnen zu können, brauchen wir noch Gleichungen! Wie drückt man obige Sachverhalte durch Gleichungen aus? Nun zunächst ist doch klar, dass jeder Punkt der Hüllkurve auf einer der Geraden der Schar liegen muss. Deswegen muss Gleichung (1) erfüllt sein. Die zweite Überlegung ist, dass der Punkt der Hüllkurve, der auf der (auf einer) Geraden liegt, der Berührpunkt ist. Dieser Berührpunkt wird sich nicht − bzw. nur infinitesimal − verändern, wenn der Parameter (hier: α) sich infinitesimal verändert. Das ist gleichbedeutend damit, dass die partielle Ableitung der Kurvenschar nach dem Parameter (hier: α) gleich Null ist:
Gleichung (3) ist äquivalent mit Gleichung (1). Und die partielle Ableitung nach rechnen wir jetzt aus:
Bei einer partiellen Ableitung werden alle anderen Variablen (hier: ) wie Konstanten behandelt. Die Variable , nach der wir ableiten wollen, steckt in zwei Summanden (→ Summenregel) jeweils in zwei verketteten Funktionen, die äußere Funktion ist der Kehrwert und die innere ist die jeweilige trigonometrische Funktion. Deswegen brauchen wir die Kettenregel.
Die Quadrate im Nenner kommen von der Ableitung des Kehrwerts (→ Potenzregel mit Exponent ). Außerdem kommen daher die Minuszeichen: Beim ersten Summanden wird es durch den negativen Sinus als innere Ableitung des Cosinus wieder aufgehoben, beim zweiten Summanden bleibt es stehen. Damit ist schon gesagt, woher der Sinus bzw. der Cosinus im Zähler kommen: Das sind die inneren Ableitungen gemäß Kettenregel.
Durch Division durch die Faktoren in den Zählern erhalten wir:
Damit ergeben sich Gleichungen für bzw. für die trigonometrischen Funktionen, denn auf beiden Seiten der Gleichung muss derselbe Wert herauskommen, den ich hier genannt habe:
Gleichung (7) und (8) können wir nun in Gleichung (3) bzw. (1) einsetzen, nach den Rechenregeln für Potenzen kürzen und erhalten:
Alles was uns jetzt noch stört, ist diese komische Konstante . Um sie zu eliminieren, benutzen wir den Satz des Pythagoras in trigonometrischer Verkleidung, auch die trigonometrische Grundidentität genannt, und setzen auch darin Gleichungen (7) und (8) ein:
Wenn wir nun die linke Seite der Gleichung (10) für in die quadrierte Gleichung (9) einsetzen, erhalten wir unser Endergebnis:
 Gleichung (11) ist die Hüllkurve, die die Grenze des Bereichs beschreibt, den die Leiter überstreicht, wenn sie die Wand hinunterrutscht. Diese Kurve hat auch einen Namen: Sie heißt Astroide und entsteht auch bei anderen Gelegenheiten, z. B. beschreibt ein Punkt auf einem kleinen Kreis, der in einem großen Kreis abrollt, diese Form, wenn das Verhältnis der Radien gleich vier ist.
Gleichung (11) ist die Hüllkurve, die die Grenze des Bereichs beschreibt, den die Leiter überstreicht, wenn sie die Wand hinunterrutscht. Diese Kurve hat auch einen Namen: Sie heißt Astroide und entsteht auch bei anderen Gelegenheiten, z. B. beschreibt ein Punkt auf einem kleinen Kreis, der in einem großen Kreis abrollt, diese Form, wenn das Verhältnis der Radien gleich vier ist.
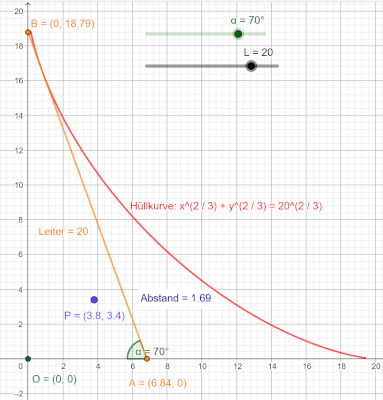
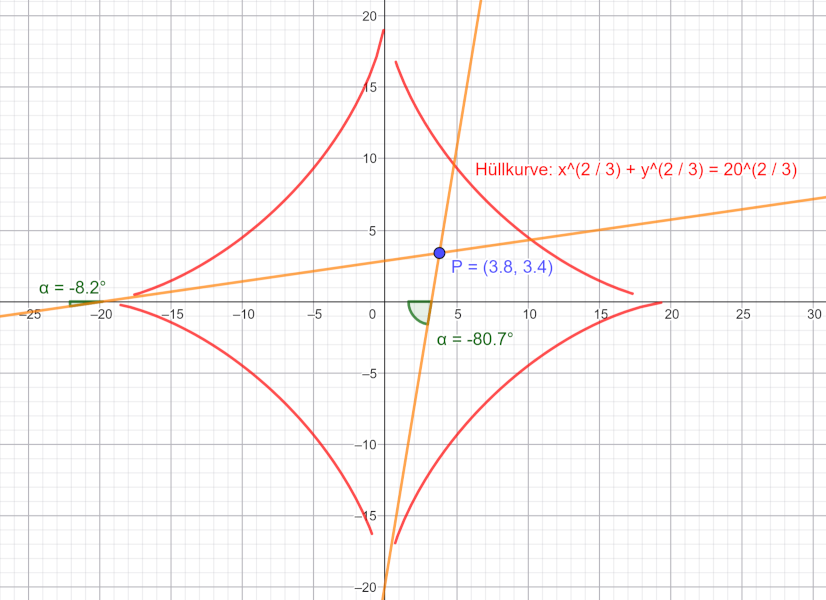
Nebenstehende Grafik zeigt, wie diese Kurve aussieht.
Man erkennt, dass die orangefarbene Leiter eine Tangente an die rote Hüllkurve darstellt.
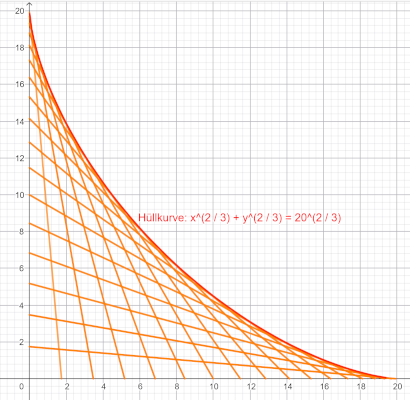 Zur weiteren Verdeutlichung ist im Bild links die Leiter nochmals als Kurvenschar dargestellt, indem der Parameter in 5°-Schritten verändert wurde, sodass man erkennen kann, dass die Leiter tatsächlich immer eine Tangente an die Hüllkurve bildet.
Zur weiteren Verdeutlichung ist im Bild links die Leiter nochmals als Kurvenschar dargestellt, indem der Parameter in 5°-Schritten verändert wurde, sodass man erkennen kann, dass die Leiter tatsächlich immer eine Tangente an die Hüllkurve bildet.
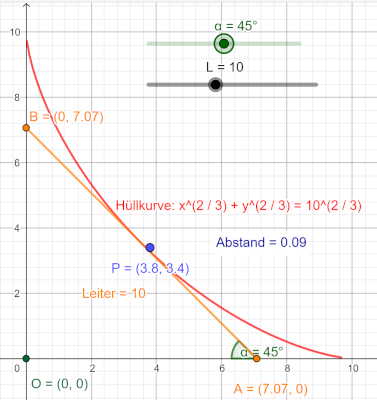 Was man nun allerdings auch erkennen kann, ist der anfänglich erwähnte Denkfehler: Der Punkt P, die Steckdose, liegt nicht auf der Hüllkurve!
Was man nun allerdings auch erkennen kann, ist der anfänglich erwähnte Denkfehler: Der Punkt P, die Steckdose, liegt nicht auf der Hüllkurve!
Aber immerhin sieht man auch, dass die Steckdose tatsächlich zum Problem werden kann, weil sie nämlich innerhalb der Hüllkurve liegt.
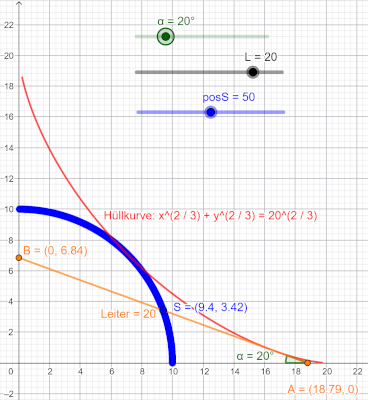
Wir können unser mathematisches Modell dazu verwenden, einen anderen Problemlösungsansatz zu überprüfen: Wie kurz müssten wir die Leiter machen, damit sie nicht mehr an der Steckdose vorbei sondern − bei jedem Anstellwinkel − darunter her streicht?
Nebenstehendes Bild zeigt, dass eine Leiter der halben Länge eine solche Lösung wäre, weil sie 9 mm Abstand von der Steckdose hätte. − Wieder ein Denkfehler! Bei diesem Lösungsansatz müssten wir die gegenüber liegende Ecke der Steckdose betrachten! Dann sind die Koordinaten des Punktes (es handelt sich um eine Doppelsteckdose).
Ein schönes Beispiel für die Gültigkeit von Modellen, die man bei ihrer Anwendung immer im Blick haben muss!
Grafisch mit Hilfe der Geogebra-Datei habe ich überprüft, dass die Leiter nur bis zu einer Länge von ca. 67 cm bei jedem Anstellwinkel unter der Steckdose hindurchgleiten würde.
Wie könnten wir rechnerisch prüfen, ob der Punkt innerhalb oder außerhalb der Hüllkurve liegt? Das ist einfach: Wir brauchen nur seine Koordinaten in die linke Seite der Gleichung (11) einsetzen und sie mit der gewünschten Leiterlänge, eingesetzt in die rechte Seite, vergleichen: Ist die linke Seite kleiner als die rechte, dann liegt der Punkt innerhalb, ist sie größer, liegt er außerhalb der Hüllkurve. Sind beide Seiten gleich, liegt auf der Hüllkurve, genau das sagt Gleichung (11) ja aus.
Also passt die Lieter bei einer Länge bis zu 6,7 dm in jedem Anstellwinkel unter der Steckdose hindurch.
Das alles ist aber nur noch von akademischem Interesse, weil das erstens viel zu kurz ist und die Leiter ja in einem festen Anstellwinkel montiert werden soll − und eben möglichst nicht die Wand hinunter gleiten soll. Kommen wir also zur Berechnung des maximal möglichen Anstellwinkels, bei dem die Leiter die Steckdose gerade noch nicht berührt:
Maximaler Anstellwinkel
Nun haben wir viel gerechnet und gelernt, aber die ursprüngliche Frage, in welchem Winkel wir die Leiter maximal anstellen können, bevor sie gegen die Steckdose stößt, haben wir immer noch nicht gelöst. Natürlich kann man auch das einfach in Geogebra ausprobieren und kommt auf . Aber kann man das auch ausrechnen?
Die überraschende Antwort ist: Ja, aber das ist verdammt kompliziert!
Warum? Der Ansatz ist doch einfach: Wir müssen doch nur die Koordinaten von in Gleichung (1) einsetzen und nach α auflösen!
Wie bekommen wir nun das α aus dem Sinus und dem Cosinus heraus? Nur indem wir α in den Tangens hinein packen! Aber immerhin haben wir dann nur noch eine Funktion, in der α steckt. Dazu ersetzen wir Sinus und Cosinus durch Ausdrücke mit dem Tangens und das geht so:
Nun setzen wir Gleichung (15) in Gleichung (16) ein und erhalten:
Analog lässt sich herleiten, dass
Nun überlegen wir uns noch, dass in unserer Anwendung gilt, was dazu führt, dass wir immer die positive Wurzel benutzen dürfen.
Wenn wir damit Gleichungen (18) und (19) in Gleichung (14) einsetzen, erhalten wir einen Ausdruck, der außer den bekannten Konstanten nur noch enthält.
Damit es etwas übersichtlicher wird, schreibe ich letzteres nun nur noch als . Man könnte vornehm auch sagen, ich substituiere :
Das mühsame Ausmultiplizieren von Gleichung (22) führt auf ein Polynom vierten (!) Grades in :
Tatsächlich hat die Copilot-KI dafür heute (26.02.2026) eine analytische Lösung gefunden. Die war nur leider falsch. Copilot wollte eine (nicht vorhandene) palindromische Form ausnutzen, die aber nur dann gegeben wäre, wenn wäre.
Gehen wir also zunächst den einfachsten Weg und suchen eine grafische Lösung!
Eine?
Nein! Wenn wir uns alle möglichen Positionen der Leiter ansehen, stellen wir fest, dass es zwei Positionen gibt, bei denen die Leiter genau auf der Ecke der Steckdose liegt. Sehen wir uns das in unserem Modell an:

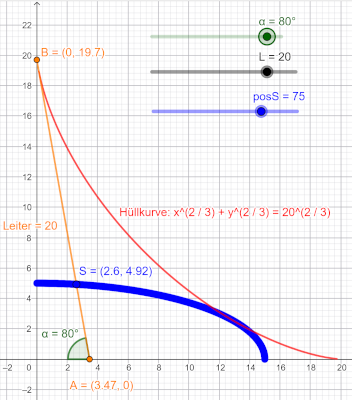
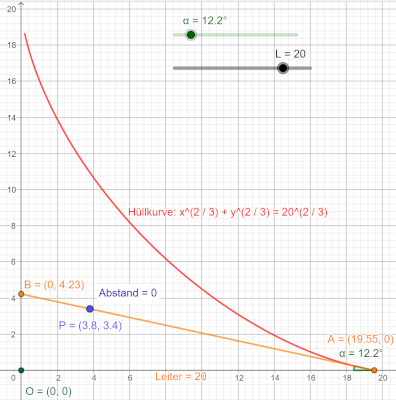 Die Leiter kann einerseits steil an der Wand lehnen und in ihrem unteren Bereich die Steckdosenecke P berühren, andererseits kann sie flach angestellt werden, fast liegen, und P in ihrem oberen Bereich berühren.
Die Leiter kann einerseits steil an der Wand lehnen und in ihrem unteren Bereich die Steckdosenecke P berühren, andererseits kann sie flach angestellt werden, fast liegen, und P in ihrem oberen Bereich berühren.
Für meine Anwendung als Stummer Diener ist natürlich nur relevant.
Auch wenn die Copilot-KI sie nicht gefunden hat, gibt es eine geschlossene Lösung für Polynome vierten Grades, mit der wir diese Winkelwerte auch ausrechnen können (ähnlich wie die Mitternachtsformel für quadratische Gleichungen). In der Wikipedia wird die entsprechende Formel angegeben und wenn man sie ohne Hilfsgrößen hinschreibt, ist sie absurd lang!
Wenn wir den in der Wikipedia angegebenen Lösungsweg auf Gleichung (23) anwenden wollen, müssen wir zunächst die Parameter durch Koeffizientenvergleich ermitteln:
Diese Werte setzen wir jetzt in die Nullstellenformel ein, die in der Wikipedia steht. Dabei habe ich, um Verwechslungen zu vermeiden, und durch und ersetzt, weil wir und ja bereits für die Koordinaten des Punktes benutzt haben. Und die unabhängige Variable heißt bei uns ja nicht sondern .
Diese Gleichungen sind nur deswegen so schön kurz, weil darin die Hilfsgrößen , und verwendet werden. Die müssen wir natürlich auch noch ausrechnen:
Und schon wieder stecken in der Formel (38) für die Hilfsgröße S weitere Hilfsgrößen nämlich und , sodass wir für noch keinen Zahlenwert angeben können. Wir müssen erst diese weiteren Hilfsgrößen ausrechnen:
Es ist doch nicht zu glauben! Noch bevor wir alle Hilfsgrößen ausgerechnet haben, taucht mit schon die nächste auf! Das erinnert ja an eine Matrjoschka! Aber die Größen und sind nicht ohne Grund durchnummeriert. Im Wikipediaartikel ist ihre weitergehende Bedeutung erklärt. Hier wollen wir sie erst mal nur berechnen:
Und hier taucht endlich auch mal der Koeffizient aus Gleichung (33) auf! Es wäre ja schon sehr verwunderlich, wenn der überhaupt keine Rolle spielen würde. Jedenfalls können wir damit nun berechnen und die Matrjoschkapuppen wieder ineinander setzen.
Weil es sich um eine dritte Wurzel handelt, gibt es drei (kompolexe) Lösungen für . (Bei mathepedia.de wird das Rechnen mit komplexen Zahlen − also das Rechnen mit einer Zahlenwelt, in der es die als imaginäre Einheit gibt − gut erklärt.) Es spielt aber keine Rolle, welchen der drei Werte wir zum Weiterrechnen benutzen. Ich habe den ersten genommen. Weiter unten steht, wie ich diese Behauptung des Wikipediaartikels verifiziert habe und was passiert, wenn man mit einem anderen Q-Wert weiterrechnet.
Alle Hilfsgrößen rückwärts in Gleichungen (34) und (35) eingesetzt ergibt sich dann:
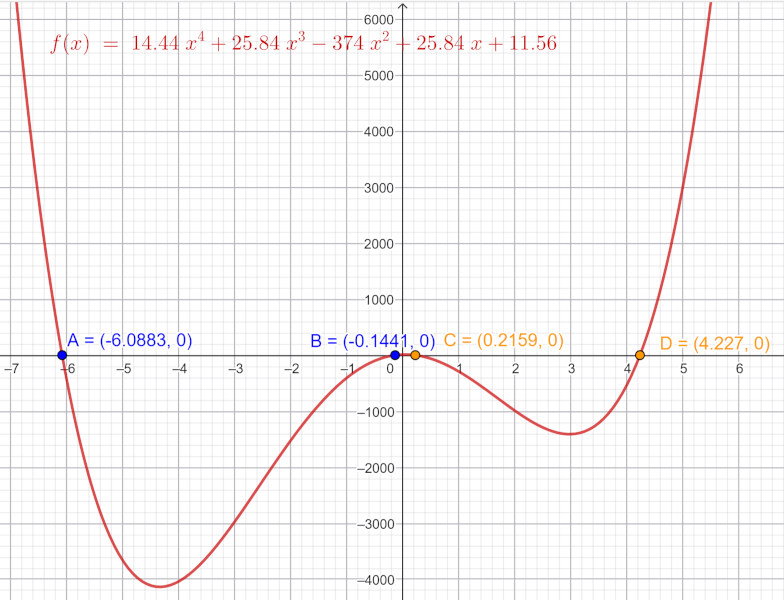
In nebenstehendem Bild ist das Polynom aus Gleichung (23) bzw. (28) mit seinen Nullstellen zu sehen, die Geogebra natürlich nur numerisch gefunden hat. Aber sie stimmen mit unseren rechnerisch gefundenen Werten überein. Wir dürfen also davon ausgehen, uns nicht verrechnet zu haben.
(Man beachte die stark unterschiedlichen Skalen auf der x- bzw. y-Achse! Vierte Potenzen führen recht schnell zu sehr großen Zahlen.)
Das sind nun endlich die Lösungen der quartischen Gleichung (23)! Was bedeuten Sie? Wollten wir nicht eigentlich einen Winkel ausrechnen? Ja. Wir erinnern uns, dass wir auf dem Weg von Gleichung (13) zu Gleichung (20) durch ersetzt haben. Die Lösungen (44) bis (47) sind also Tangenswerte. Diese müssen wir nun nur noch mit auf Winkelwerte zurückrechnen und kommen auf:
Und siehe da: Nach sehr viel Rechnerei kommen wir mit und auf dieselben Werte, die wir in (26) und (27) auch grafisch ermittelt hatten! Und warum gibt es hier vier Lösungen? Was bedeuten die beiden negativen Winkelwerte?
 Das sind die Steigungen derjenigen Tangenten, die im zweiten und vierten Quadranten an die Hüllkurve (die als Astroide in jedem Quadranten einen Ast hat) angelegt ebenfalls durch den Punkt P gehen. Die Rechnung ist also zwar viel komplizierter als die einfache grafische Lösung, aber dafür liefert sie alle denkbaren Möglichkeiten.
Das sind die Steigungen derjenigen Tangenten, die im zweiten und vierten Quadranten an die Hüllkurve (die als Astroide in jedem Quadranten einen Ast hat) angelegt ebenfalls durch den Punkt P gehen. Die Rechnung ist also zwar viel komplizierter als die einfache grafische Lösung, aber dafür liefert sie alle denkbaren Möglichkeiten.
Berechnung quartischer Gleichungen mit Python
Obwohl die Copilot-KI beim ersten Versuch den peinlichen Fehler gemacht hat, wollte ich ihr eine zweite Chance geben und habe ihr folgende Aufgabe gestellt:
"Schreibe mir ein Python-Programm, das die Nullstellen eines Polynoms vierten Grades berechnet wie unter https://de.wikipedia.org/wiki/Polynom_vierten_Grades#L%C3%B6sung_der_Gleichung_vierten_Grades_durch_Radikale_(Wurzelausdr%C3%BCcke) beschrieben!"
Dieses Mal wurde ich positiv überrascht:
Ich bekam ein vollständiges Pythonprogramm, das die folgende Ausgabe liefert, wenn man in Zeile 119 die Werte aus Gleichungen (29) bis (33) für a, b, c, d und e einsetzt:
Wurzeln:
(-0.1440949991539089-7.5578700170249155e-16j)
(-6.088305330210063+1.8287370777236032e-17j)
(4.227048814814568-3.908480870023092e-17j)
(0.21587783033887797+7.765844396254865e-16j)
Die ausgegebenen Werte sind komplexe Zahlen, zu erkennen an dem nach dem zweiten Teil der Zahl, das als Faktor ihren Imaginärteil kennzeichnet. Python hat die Eigenart, die imaginäre Einheit mit statt mit zu bezeichnen. Offenbar hatten bei der Entwicklung dieser Programmiersprache Elektrotechniker einen größeren Einfluss als Mathematiker. Erstere pflegen das nämlich so zu tun, weil in der Elektrotechnik der Buchstabe bereits für die elektrische Stromstärke reserviert ist.
Jedenfalls sehen wir, dass bei allen vier Ausgabewerten der Imaginärteil extrem klein ist, kleiner als . Dabei handelt es sich um Rundungsfehler, die durch die begrenzte Anzahl von Bits entstehen, die ein Computer zur Darstellung von Zahlen mit unendlich vielen Nachkommastellen (Wurzeln!) verwenden muss. Im Gegensatz zu einem handelsüblichen Taschenrechner nimmt Python keine automatische Rundung auf z. B. zwölf Nachkommastellen vor und das Copilot-Programm hat sich um diesen Aspekt auch nicht gekümmert. Jedenfalls bedeuten diese Zahlen, dass der echte Imaginärteil der berechneten Wurzeln gleich Null ist, es sich also um reelle Zahlen handelt.
Immerhin verwendet das Copilot-Programm aber eine interessante Methode, um diesen Rundungsfehler klein zu halten: Die Art der Berechnung der Polynomwerte in
poly4_eval(a,b,c,d,e,x)
in Zeile 114, vermeidet die Nutzung der Potenzfunktion und ersetzt sie durch die effizientere Multiplikation, indem folgender Zusammenhang verwendet wird:
Ich habe das Python-Programm auch benutzt, um zu verifizieren, dass man wirklich dieselben Ergebnisse erhält, wenn man einen der anderen beiden Werte für die Hilfsvariable Q benutzt, die sich aus Gleichung (39) ergeben. Das lässt sich einfach realisieren, indem man in Zeile 76 die Reihenfolge der Kandidaten verändert also z. B. indem man schreibt:
Q_candidates = [Q0*omega, Q0, Q0*omega*omega]
Wenn man das tut, erhält man genau dieselben Werte für bis − nur in einer anderen Reihenfolge.
Kurve von Punkten auf der Leiter
"Chapeau!" jedem, der bis hierhin gelesen hat!
Ganz zum Schluss möchte ich noch auf ein Phänomen aufmerksam machen, das mit der ursprünglichen Problemstellung bezüglich der Steckdose nichts zu tun hat, sondern nur mit der die Wand herunterrutschenden Leiter: Wenn wir einen festen Punkt auf der Leiter betrachten, während diese die Wand hinunterrutscht, was für eine Kurve beschreibt dieser Punkt?
Die Antwort ist: Eine Ellipse! Genauer gesagt eine Viertelellipse. Die Halbachsen der Ellipse entsprechen den Leiterabschnitten, die dieser Punkt erzeugt. In dem Sonderfall, dass der Punkt genau auf der halben Länge der Leiter sitzt, ergibt sich also ein Viertelkreis.
In der Geogebra-Datei heißt dieser Punkt S und mit dem Schieberegler posS lässt sich einstellen, bei wie viel Prozent der Leiterlänge er sich befindet. Dieser Punkt zieht eine Spur, sodass man seine Bahn erkennen kann, sobald man den Schieberegler für den Anstellwinkel α bewegt.
Neben- oder vorstehende Bilder (je nach Bildschirmbreite) zeigen diese Bahnkurven für 50% und 75% der Leiterlänge:
Wie kann man rechnerisch zeigen, dass es sich wirklich um eine Ellipse handelt?
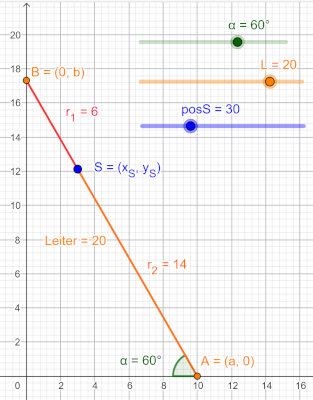
Dazu teilen wir die Leiter in zwei Teile: Der erste Teil ist die Strecke vom Punk S zum Punkt B und der zweite Teil ist die Strecke vom Punk S zum Punkt A. Die Längen dieser Strecken lassen sich mit dem Strahlensatz berechnen. Dazu müssen wir uns noch daran erinnern, dass wir die x-Koordinate des Punktes A mit a und die y-Koordinate des Punktes B mit b bezeichnet haben. Die Koordinaten des Punktes S nennen wir .
Wo sind jetzt unsere Strahlen und Parallelen für den Strahlensatz? Es gibt zwei Strahlenpaare:
Das erste geht vom Punkt A aus und wird von der Leiter und der x-Achse gebildet. Die schneidenden Parallelen sind die y-Achse und die Senkrechte durch den Punkt S.
Das zweite Strahlenpaar geht vom Punkt B aus und wird von der Leiter und der y-Achse gebildet. Die schneidenden Parallelen sind die x-Achse und die Horizontale durch den Punkt S.
Der Strahlensatz besagt dann die Gleichheit der folgenden Verhältnisse:
Außer dem Strahlensatz machen wir uns noch den Satz des Pythagoras zunutze, wonach das Quadrat der Leiterlänge der Summe der Quadrate von a und b entspricht:
Nun formen wir Gleichungen (53) und (54) nach a bzw. b um und setzen das Ergebnis in Gleichung (55) ein:
Jetzt müssen wir nur noch durch dividieren und schon steht eine Ellipsengleichung für die Koordinaten unseres Puntes da:
Wenn der Punkt S in der Mitte der Leiter sitzt, dann ist und wir können mit multiplizieren, um die Kreisgleichung zu erhalten:
Schlusswort

Zum Beweis, dass das keine ausgedachte Problemstellung war, hier der reale, inzwischen fertiggestellte Stumme Diener. Auch die Steckdose ist auf dem Foto gut zu erkennen.
Wie gut passt unser Modell denn nun zur Wirklichkeit? Die echte Leiter steht in einem Winkel von α = 73° an der Wand und die Steckdose hat zur Wange einen Abstand von 6,5 cm. Laut unseres Modells sollte der Abstand aber 9,6 cm betragen! Der Unterschied kommt daher, dass die Leiter oben und unten abgeschrägt ist, ihre wirksame Länge also weniger als 20 dm beträgt. Der Tischler (Benno Borchert, BB-Tischlerei, sehr empfehlenswert!) hat vor der Fertigung ein reales Modell in Form einer Latte angehalten und den gewünschten Winkel abgenommen.
Erstaunlich was man im Zusammenhang mit einem recht banalen Alltagsproblem so alles rechnen kann, oder?
Wir haben gesehen, wie man die Hüllkurve einer parametrisierten Kurvenschar bestimmt. Dabei haben wir eine recht komplexe Ableitung benutzt.
Wir haben unser mathematisches Modell benutzt, um verschiedene Lösungsmöglichkeiten zu untersuchen: "Kann die Leiter unter der Steckdose entlang gleiten und wie kurz muss sie dafür sein?" Dabei haben wir gesehen, wie wichtig es ist, den Gültigkeitsbereich eines Modells zu beachten: Der Punkt P entsprach nur einer Ecke der Steckdose. Für die vorstehende Frage war aber eine andere Ecke relevant.
Danach haben wir gelernt, wie man die Nullstellen eines Polynoms vierten Grades berechnen kann und wie aufwendig das ist. Mit Hilfe künstlicher Intelligenz haben wir uns ein Python-Programm dafür erstellen lassen, dessen Ergebnisse mit unseren grafischen Lösungen übereinstimmten.
Zusätzlich konnten wir uns überlegen, welche Bedeutung die weiteren Nullstellen in unserem Sachzusammenhang haben und ob sie relevant sind.
Ganz zum Schluss haben wir gesehen, welch erstaunlich schöne, runde Kurve (eine Ellipsen- bzw. Kreisbahn) ein Punkt − vielleicht eine Fliege? − auf der geraden Leiter beschreibt, wenn ihre Enden sich entlang zweier gerader, rechtwinklig zueinander stehender Linien bewegen.
Ich finde das alles ziemlich erstaunlich und schön!
|
|